West Coast Placer was contracted to conduct high resolution aerial drone mapping of a coal mine in Alberta, Canada. We were hired by the environmental department to map two parts of the coal mine to aid in their reclamation efforts. We produced high resolution imagery and 3D models.
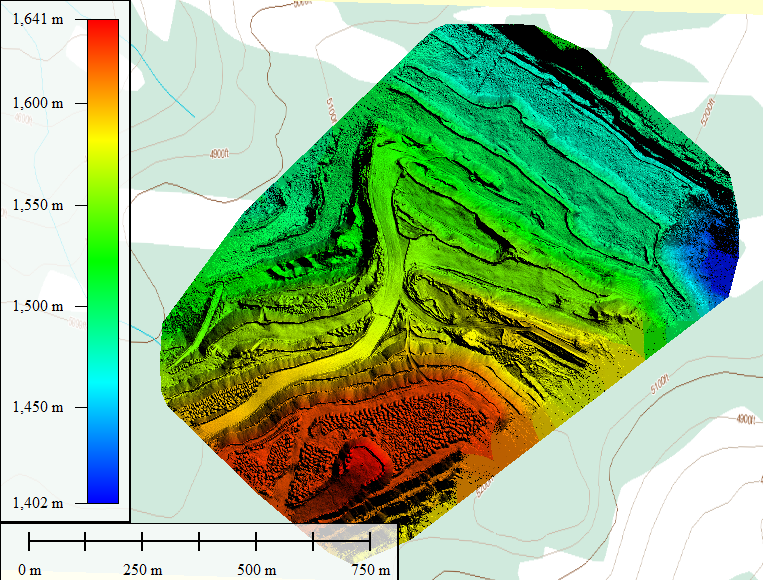
3D DSM
With our fixed wing mapping drone we were able to produce several custom mapping and imagery products. We made a beautiful high resolution orthophoto, a digital surface model (DSM) with topographical accuracy up to 30cm, a LAS format point cloud and one more 3D model. We were also able to format the 3D data so that it could be used in their mine planning software (Minesight).
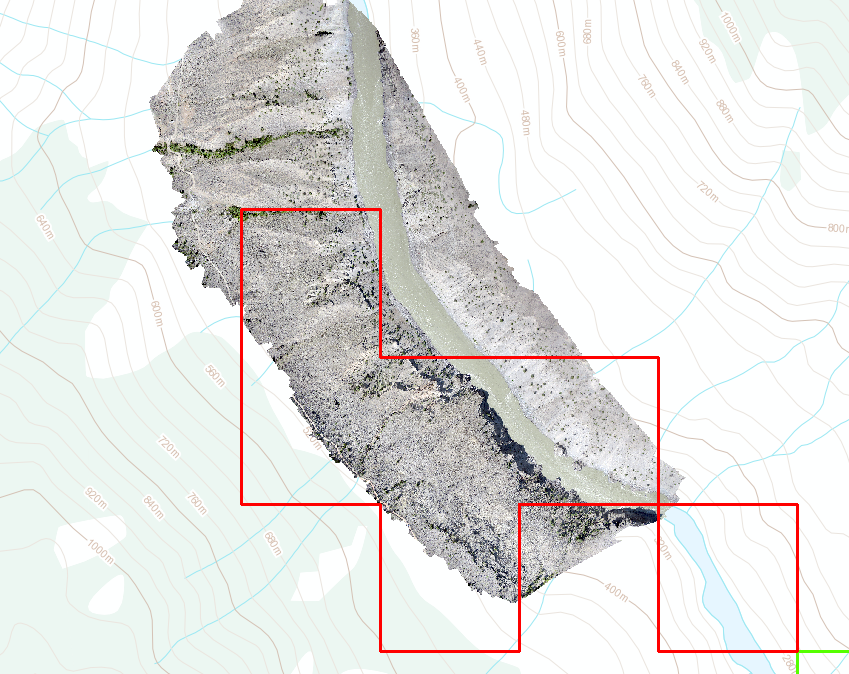
Two sections of the mine were surveyed. We flew a total of three flights in the same day. The mine asked to have the main pit flown two times to confirm the accuracy and repeatability of the data. We were happy to oblige and of course the flights matched within 2cm of each other. Each section that was flown was about 2 square kilometers and our drone has the flight duration to cover each section in one flight.
UAV Flight Path
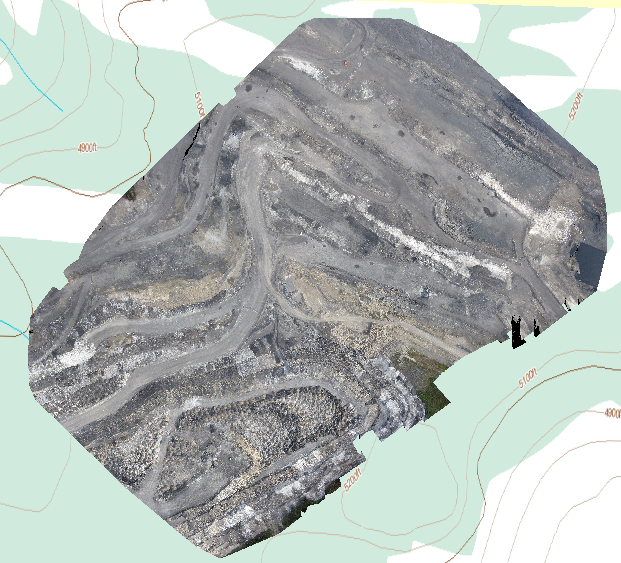
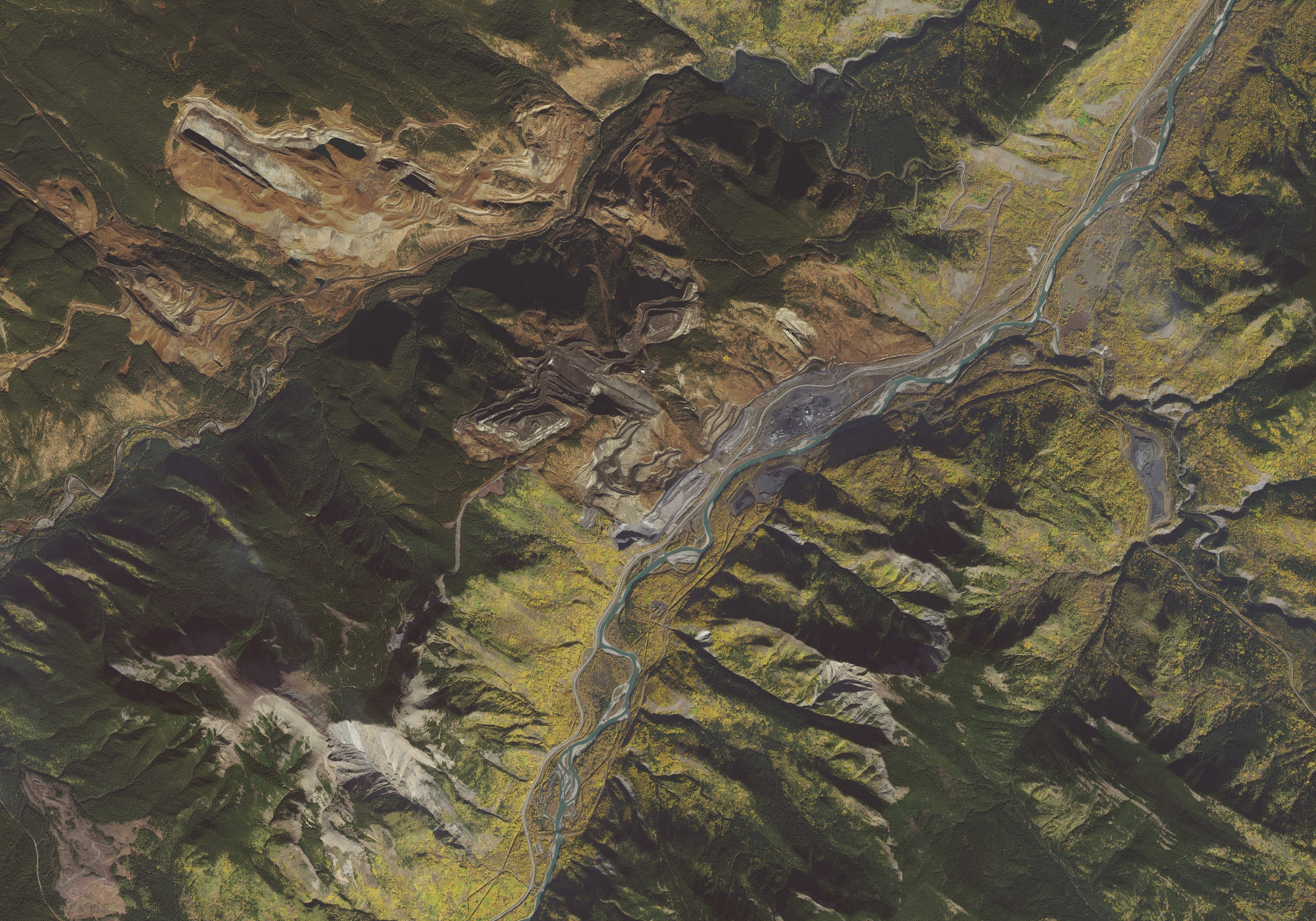
The photo quality on the still photos and orthomosaic was outstanding. We were able to achieve an image resolution on the georeferenced mosaic of 4cm/pixel. That means that each pixel in the photo represents a real world footprint of 4cm by 4cm. That kind of resolution cannot be matched by current satellite imagery providers. Actually they are not even in the same league. The best satellite imagery that you can buy today is provided by WorldView-3 satellite and has a resolution of 31cm/pixel. It also costs a lot of money. Google Earth come in at a pitiful 65cm/pixel in the best locations.
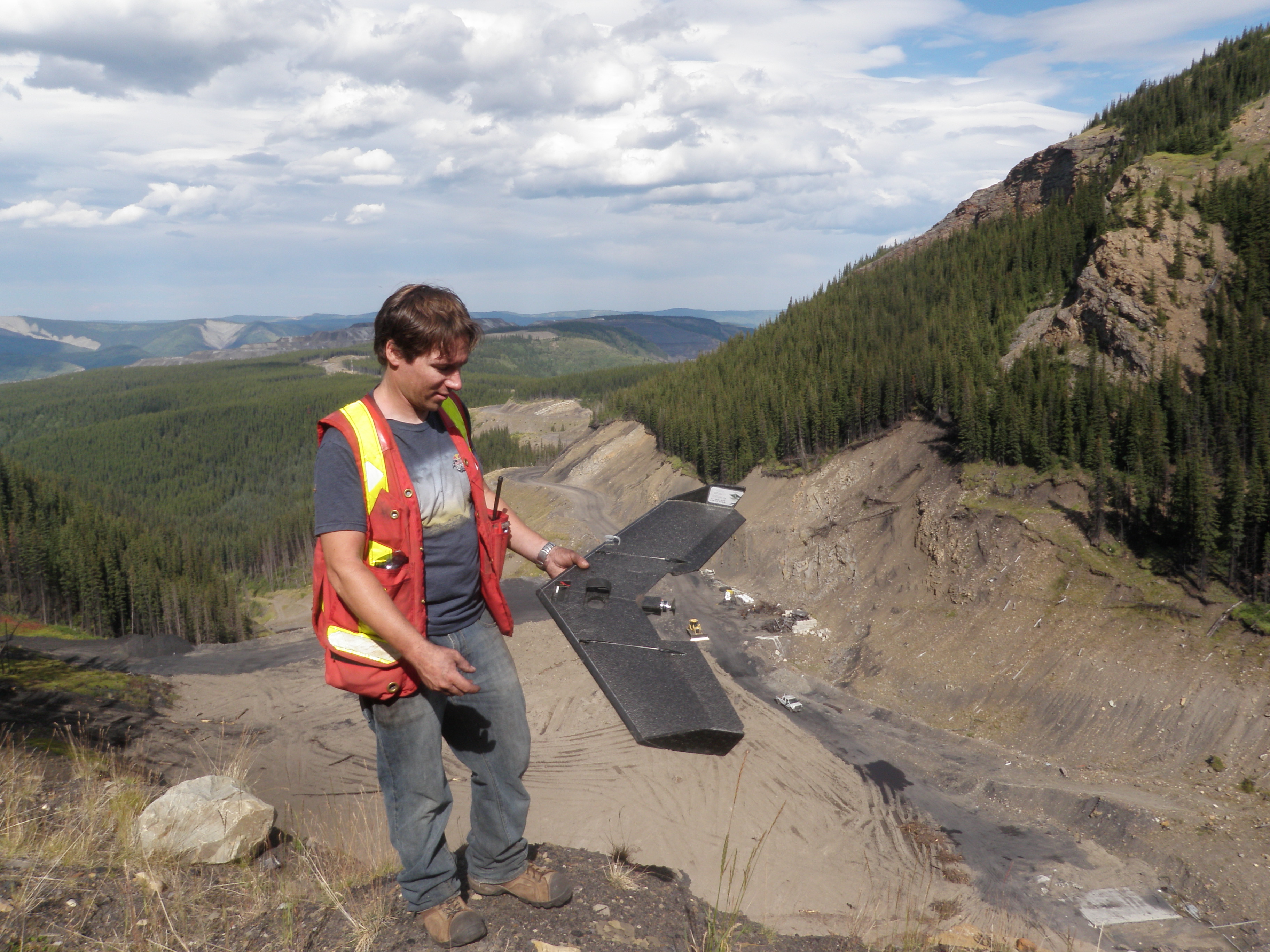
View from the top of the pit
Here are some examples of our imagery. First is a shot of the truck that we used as a base station for the drone. You can clearly see the truck, the two operators and even the pickets in the bed of the truck. You can click on these images for a larger view.
Here is a Google Earth image of the exact same location. I love Google and everything that they do but this image is just no comparison. To start with it’s three years old (despite the 2016 copyright note at the bottom), the mine does not even look like that today. The resolution is so poor that you can’t even tell what you’re looking at.
Here are a couple more shots from the same flight. You can clearly see this orange excavator and other details.
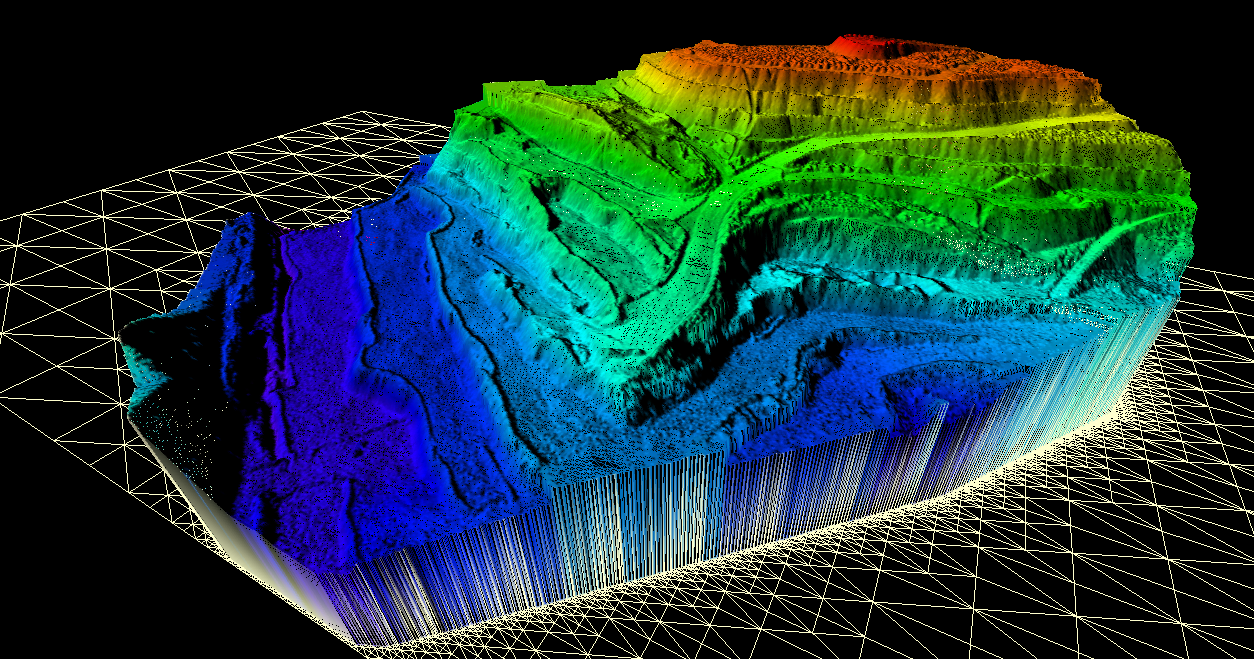
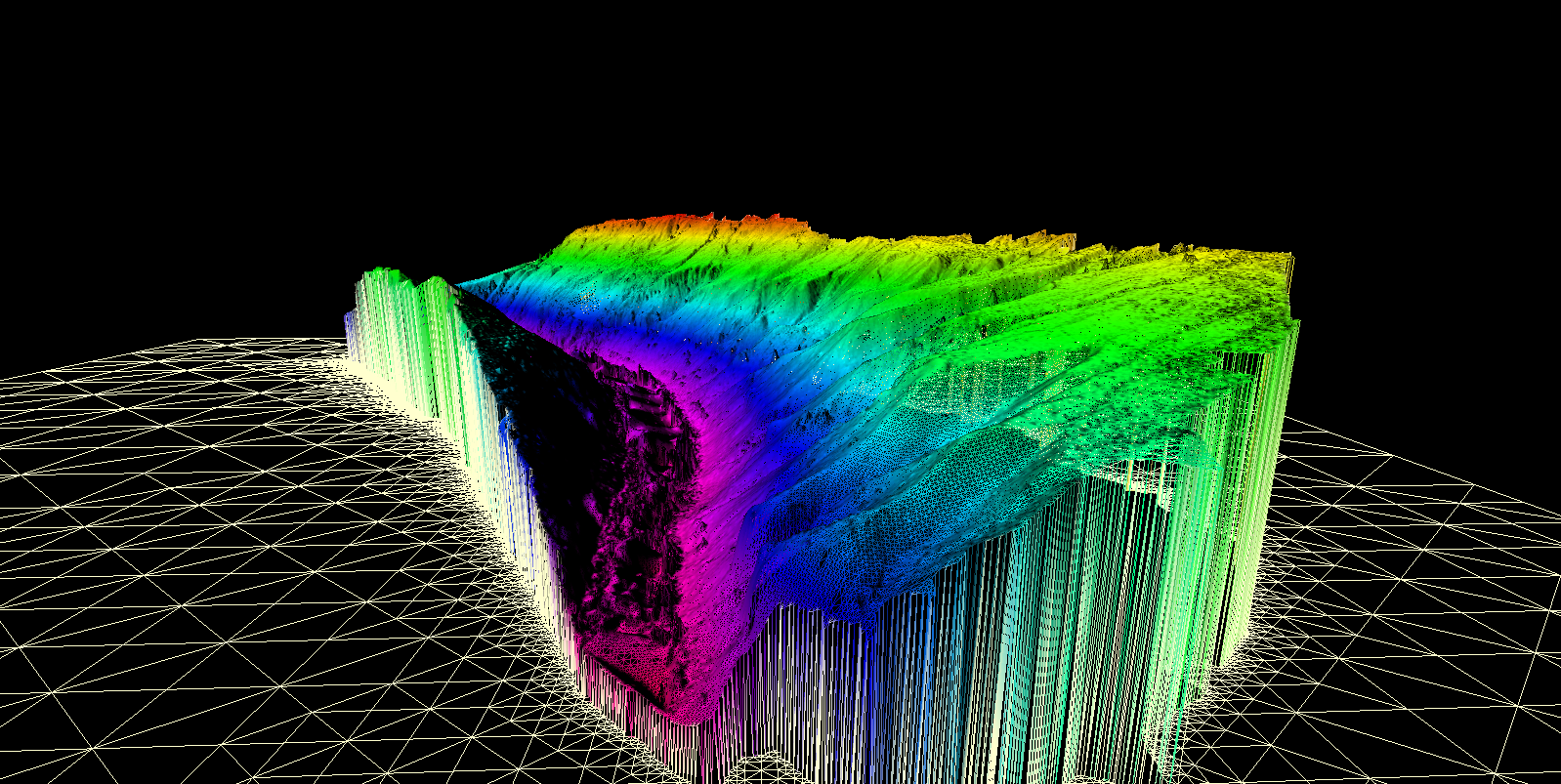
The 3D data is also incredible. Check out the video below for a great example of the 3D data that we produced. That video shows a virtual fly though of a LAS point cloud. LAS is the same format that LiDAR data produces.
Drone technology is just making it’s way into the mining world. With the low cost and amazing imagery it is a no brainer for many applications. In the case of this coal mine the environmental team now has excellent data to aid in their reclamation planning that would not have been available only a couple years ago. Check out this post on drone applications in mining.
Our client was very happy with the products that we produced especially for the price. Check out our Drone Services page for details on pricing.
Five years ago you rarely heard the word “drone”. When you did it brought up images of military air strikes and futuristic sci-fi movies. In 2015 drones have become commonplace and are starting to be used in many industries. A drone provides many advantages over traditional fixed wing data collection and the low cost makes it a practical solution to many problems. Hobbyists are also quickly getting into the game due to dropping prices. It is amazing how many people will drop $1000 or more on these high tech gadgets.
Drones, also called Unmanned Aerial Vehicles (UAVs), are flying robots that are able to execute a task autonomously. They come in several different forms but they all have the same core components. The four critical drone components are Autopilot, Propulsion, Sensors, Payload.
The Autopilot
The autopilot is the essence of what makes a drone. In order for an aircraft to be called a drone it must have the capability to fly without human intervention. The usage of the word drone has been misconstrued in recent years. Just because an R/C aircraft has four rotors and a camera does not make it a drone, it muse have autonomous flight capabilities. Autopilots are sort of the brain of a drone. They monitor all the information coming in from the sensors and send signals to the control mechanisms based on their programming.
The autopilot software functions much like a thermostat. For example if the drone’s alitutde is set at a certain number the autopilot will contol the aircraft to maintain that number. If the drone rises higher the autopilot will adjust the controls so that the drone descends, if its too low it will set the controls to climb. The autopilot operates in this way for hundreds of different parameters such as airspeed, altitude, GPS position, attitude (3D orientation), and many more.
The use of autopilots goes back to at least the late 1940s when experimental aircraft were able to operate completely by computer control. Modern commercial airliners actually employ autopilots that can control the aircraft from takeoff to landing, the only thing they can’t do is taxi. Every time you fly on a commercial jet you are riding a large autonomous robot.
For a flight to be successful the autopilot must have the parameters for the flight such as flight path, altitude, flight restrictions and settings stored in its memory before takeoff. Once in flight the autopilot will use the preprogrammed information to follow a flight pattern and land at a predetermined location. Watching an autonomous drone in action is quite an experience, they can give the impression that they are thinking for themselves.
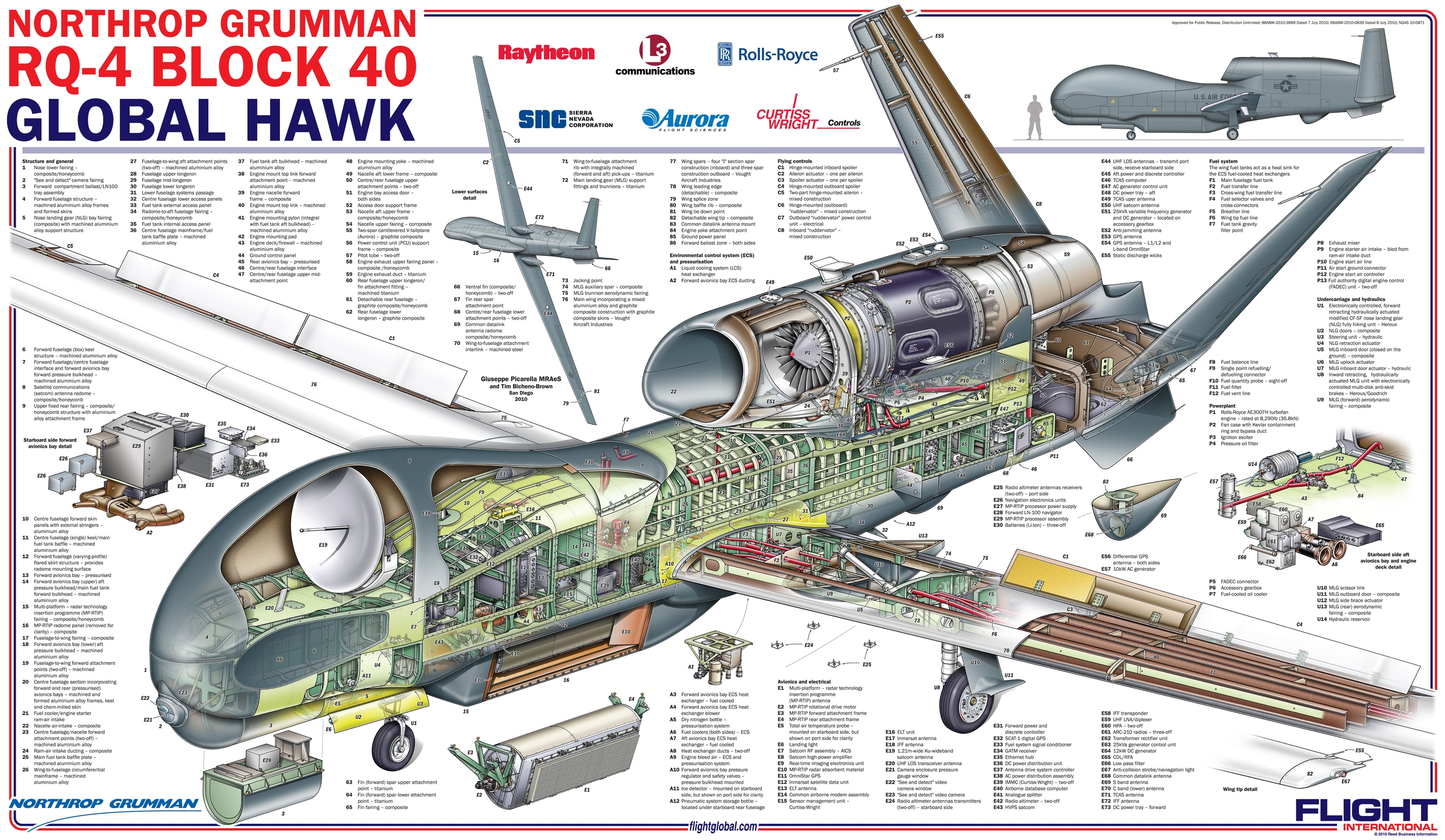
Pitot Tube
The Sensors
Sensors on a drone connect it to the real world. They perform the functions that the eyes, ears, nose and other senses do in a human. A drone can only know what the sensors tell the autopilot, much a like a human’s concept of the world is based on what we can see, smell, hear and touch. For example a drone will not have any idea it is heading directly for a tree unless it is equipped with an obstacle avoidance system. The same is true of hitting the ground or a person who walked in front of the aircraft. The pitot/static system is used to measure the current airspeed and altitude. This sensor measures air pressure from a forward facing tube, as air speed increases so does the pressure. The static tube measures the change in barometric pressure which decreases with altitude. The pitot system also measures the wind speed by comparing the airspeed to the GPS speed.
Most drones have a GPS system which is the basis for autonomous flight plans, and in the case of very accurate GPS systems altitude can be measured. Drones also have a 3 axis accelerometer which monitors the aircraft’s orientation relative to the horizon. Accelerometers are also used in smart phones, they are the device that senses when you shake or tilt the phone. More complex drones have fancy inertial measurement units (IMUs) which use gyroscopes and other methods. Drones have servos which monitor and adjust the position of control surfaces such as ailerons, or rudders. Servos are electric motors that are calibrated to precisely place their control arm. There are countless optional sensors which can add new capabilities to a drone. Some optional sensors are altitude lasers or radar, trasnponders, voltage sensors, magnetic compass, and obstacle avoidance sensors.
The Propulsion System
There are a variety of propulsion techniques in use in drones today. The majority of drones use electric motors. The typical drone that most people would think of is a multirotor helicopter. These use electric motors with a propeller on each. Thrust of each motor is carefully controlled to maintain the correct speed, altitude and attitude of the drone. Small fixed wing drones often use electric motors too although usually just one. They are typically propeller driven as well and they work together with the control surfaces to make a flight successful. Electric motors rely on battery power and can fly as long as the batteries hold a charge
Gas or heavy fuel motors are used on larger fixed wing drones and are still usually propeller driven. There are a few drones out there using jet and turboprop engines such as the Reaper (armed version of Predator). Rocket engines have been used for decades in target drones. Targets were one of the first uses of drones by the military. Its hard to believe but military forces around the world routinely shoot target drones which cost $20,000 and up each. Gas or rocket drones run on a fuel source and their flight duration depends on how long the fuel lasts. Gas drones also have batteries for their electric components and some of them have an on board generator.
I was part of the team that developed this drone
The Payload
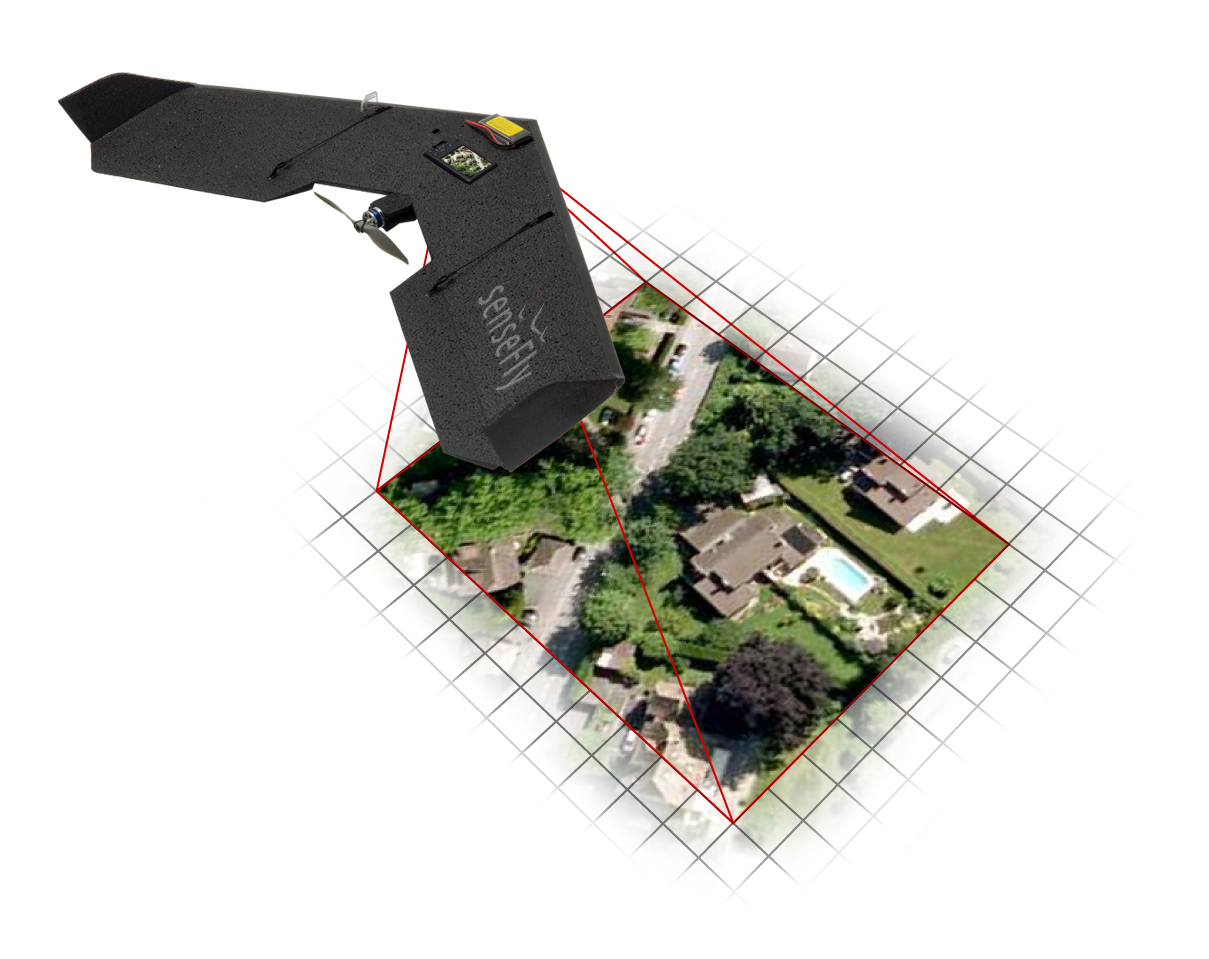
Payload is often the area where the most development work is focused. After all these robots are flying for a purpose. The most common payload is some form of a camera. The majority of drones out there are either taking photos or video. Most small drones consist of a multirotor with a GoPro camera on a gimbal. Mapping drones like the one used by WestCoastPlacer have a down facing high resolution camera that is triggered by the autopilot. Mapping drones also record the GPS position and aircraft orientation with each photo for use in processing. Different kinds of cameras can be used such as infrared, multispectral and hyperspectral.
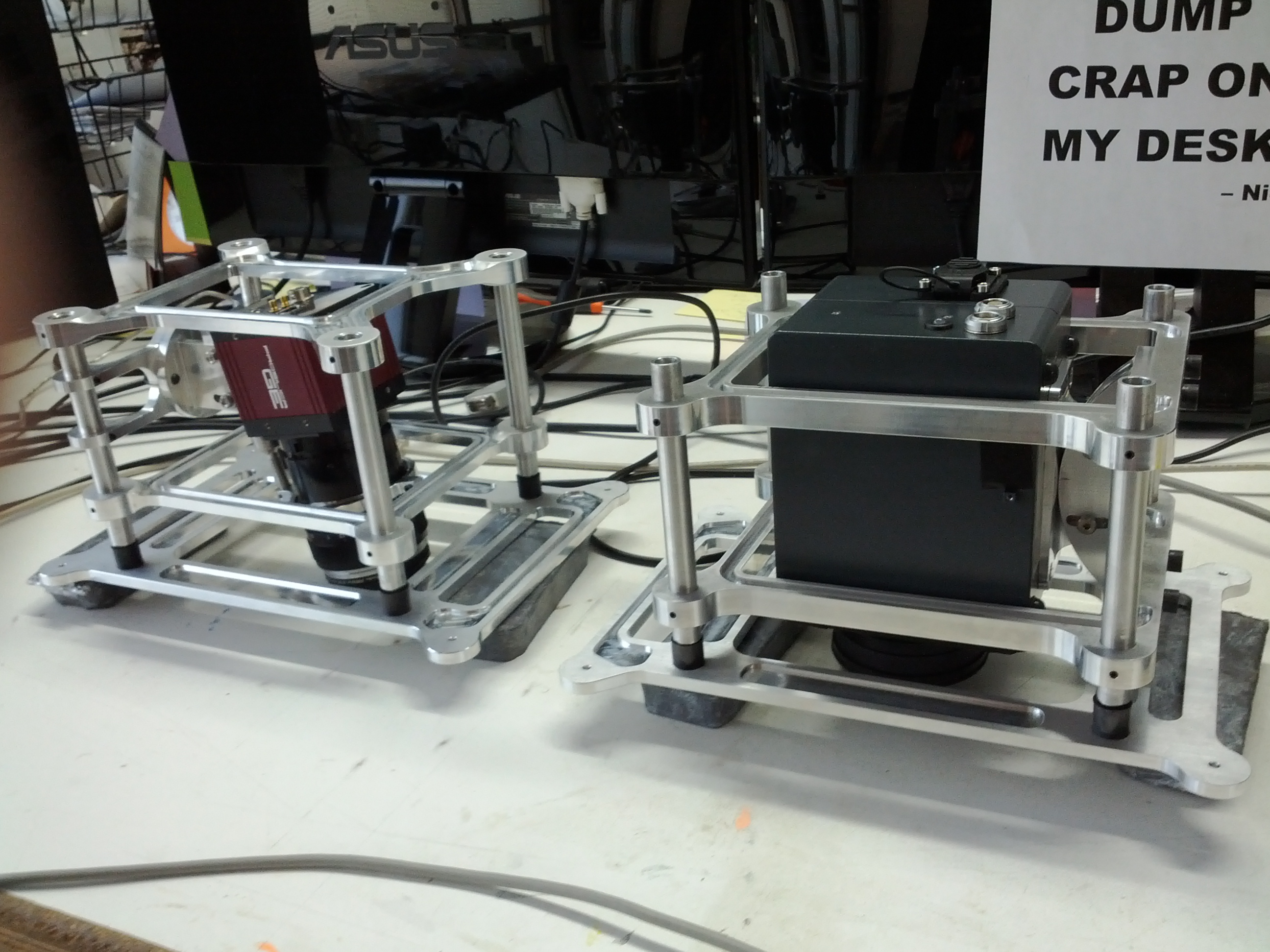
Camera mounts that I designed in 2012
LiDAR laser scanners are starting to be mounted on drones too. It has taken a long time to miniaturize LiDAR sensors to the point that a small-medium sized drone can carry one. Drone LiDAR sensors to date have not been able to provide classification so that a bare earth model can be produced.
Magnetometers are being mounted on drones too (Pioneer Exploration, GEM). These are geophysical sensors used to measure changes in Earth’s magnetic field. This sort of data is used in mineral exploration and location of land mines and submarines. There are many more payloads out there such as air quality sensors or wifi internet repeaters.
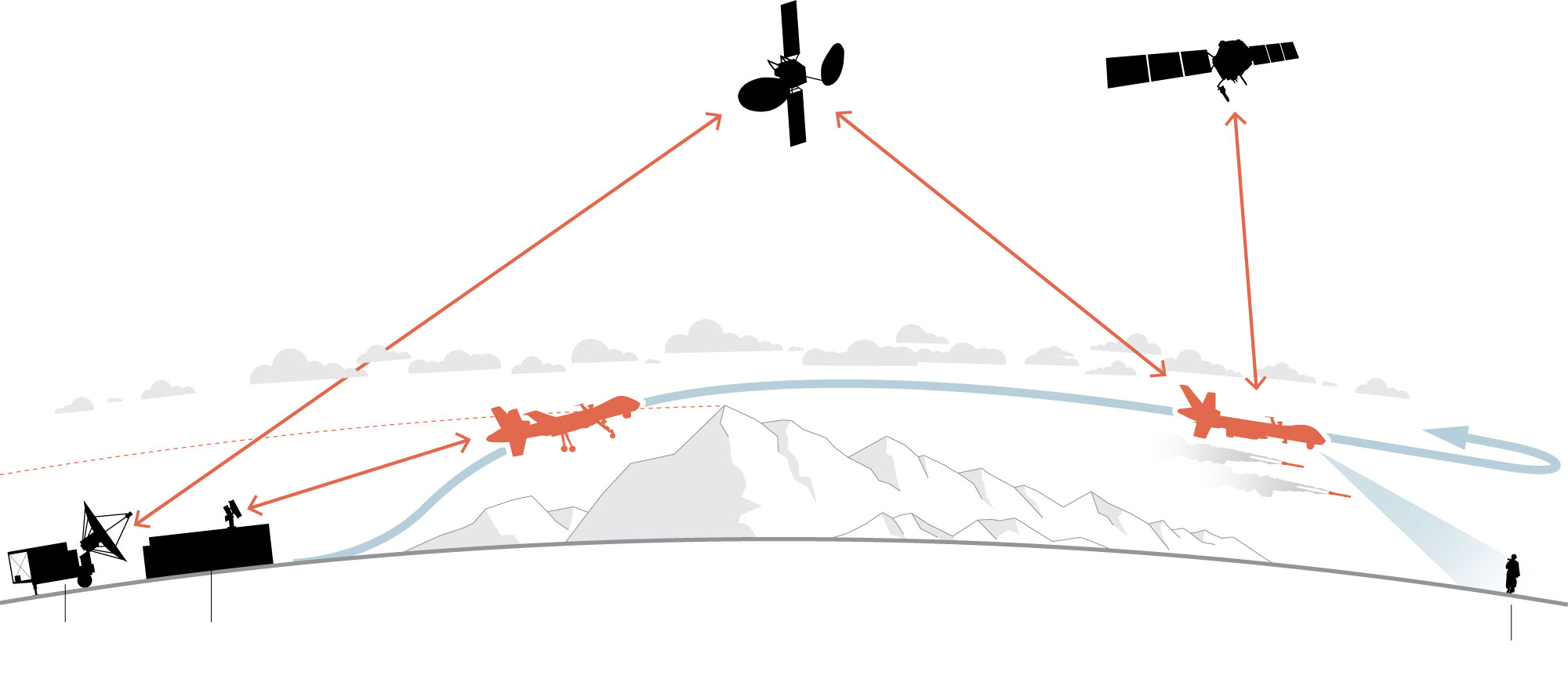
The Communication System
Another important component of a drone is the communication system. It is technically possible to operate a drone without real time communication since they fly autonomously however it is irresponsible and in most places illegal to do so. An unmanned aerial system will include some form or radio communication with the operator. The operator will have a radio link hooked up to a field computer with base station software to program the drone and monitor in during flight. On board the drone will be some form of two way radio system which will transmit data to the base station as well as allow the operator to issue commands. Telemetry data received from the drone allows the operator to monitor the flight and make sure that everything is working properly. Examples of telemetry data are things like airspeed, battery health or fuel level, position and orientation.
Typical radio frequencies that are used are 900 Mhz, 2.4 GHz or 5 Ghz. Range of a standard system is 5-10 km. Factors that affect radio range are frequency, transmit power, antenna choice and terrain. Some drone operators have had great success using directional and helical antennas. Some helical antenna systems are capable of communicating up to 100km away. Cheaper drones communicate via WiFi (also a form of radio) to a smartphone or tablet. WiFi range is limited to several hundred meters but can be extended with directional antennas.
Helical Directional Antenna with Tracker
Cellular modems are used in some drones utilizing LTE/GSM networks and can greatly increase the operating range. Essentially you can fly anywhere there is cell coverage. Satellite systems are also used which operate on a satellite phone network such as Iridium. Theses communication systems have virtually no limit on range but have slow throughput and expensive by the minute billing.
All the individual parts of drones work together to execute a flight and achieve the goal of the operator. New uses are being discovered for this technology every day. The low price and superior data quality make the UAV a powerful tool for collecting aerial data. In the coming years we are going to see drones used in more and more industries. It just makes sense.
Check out our drones page to see the drone services provided by WestCoastPlacer.
This weekend we completed an aerial mapping mission on a gold claim in BC. Our drone was able to complete four flights and took hundreds of photos. Through post processing we were able to produce a high resolution 3D model, digital terrain model (DEM) and a high resolution orthophoto mosaic.
3D Model Produced from Drone
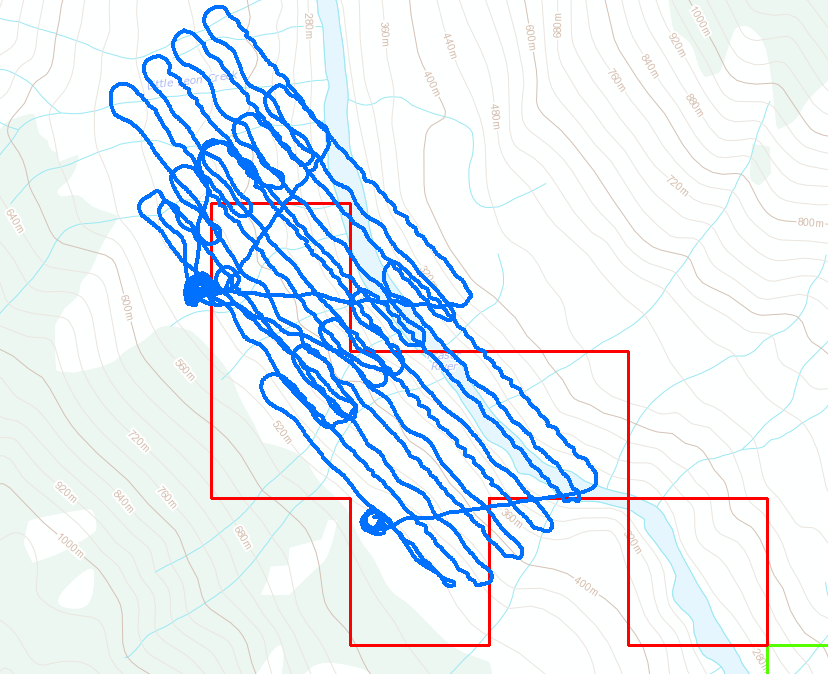
The flights were all completed in one day. Two flights had to be cancelled. One due to excessive wind, the other due to a bald eagle chasing the drone. That is the first time I’ve seen a bird chase a drone, the eagle was closing in before I diverted the drone to come home. We were able to cover an area of 2.2 square kilometers with high resolution photography. Each flight covers about 250 acres just short of 1 square kilometer per flight.
UAV Flight Paths
The photo quality that was produced is outstanding. With this flight pattern a consistent photo resolution of 4.0 cm/pixel was obtained. To put that into prespective Google Earth’s highest resolution data is at 65cm/px and the best satellite data you can buy today is 30 cm/px. Photogrammetry techniques and software were used to produce the 3D model, point cloud and mosaic stitching. This software as improved substantially in the last couple years. You do need a lot of computer horsepower to run the calculations though.
Lets take a look at some of the photos. The two photos below are showing the ghost town that is located just North of the claim boundary. Some ground photos of the same spot can be seen in this post, Southern Cariboo Prospecting Trip
Here is an image of the same spot in Google Earth for comparison:
Google Earth Ghost Town
This set shows my SUV which was set up as a base station for the UAV operations. I had a special antenna mounted on the roof and a laptop with the UAV ground control software inside the SUV. You can clearly see the vehicle and I am standing just behind it.
Here’s a short video of me launching the drone. Its a pretty simple system, once all the pre-flight programming is complete you shake it three times and send it on its way.
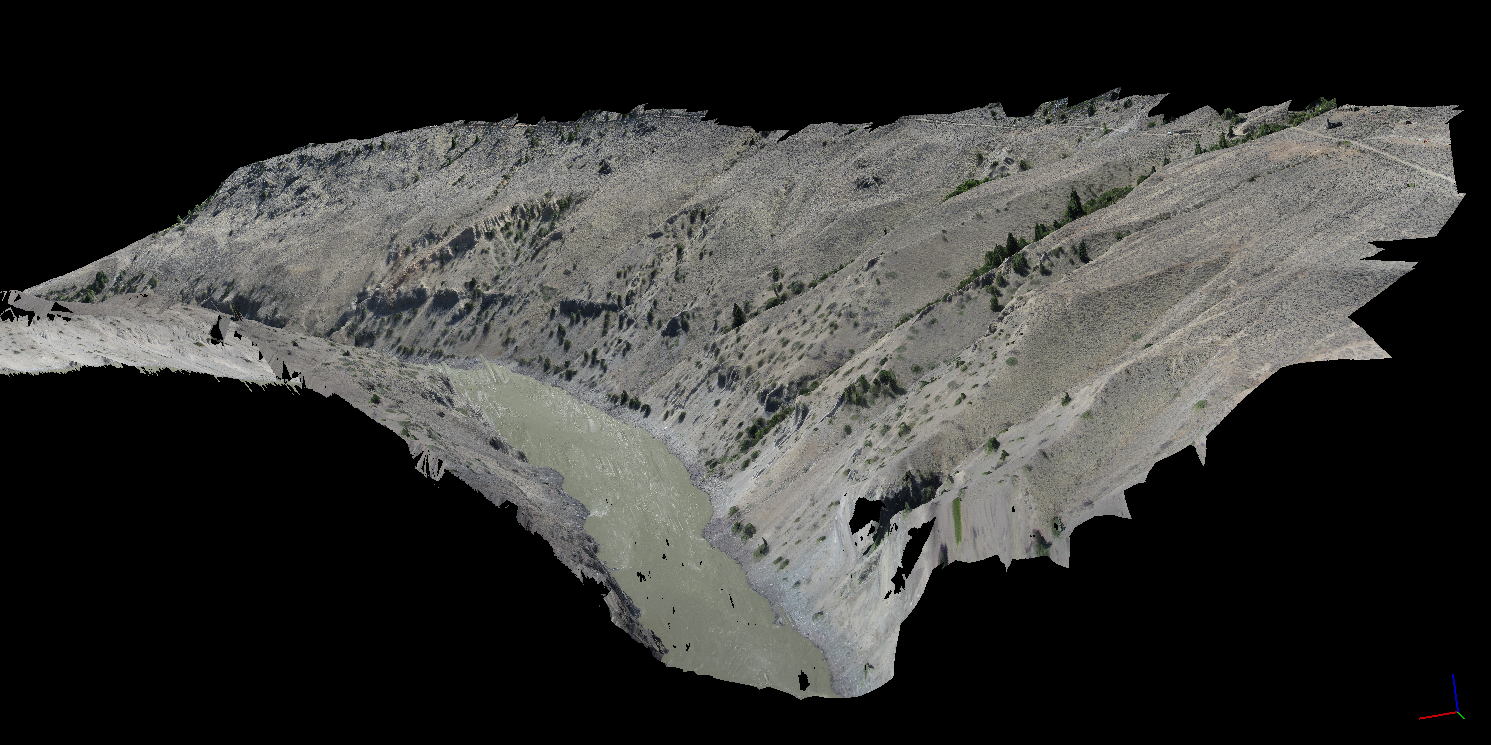
Here is an overview of the 3D model that was produced. We essentially created a 3D environemnt similar to a video game that you can fly around in and check out terrain features. Its similar to google earth except much higher resolution. The second image is actually from within the 3D model, not a photograph.
3D Model of Claim AreaInside the 3D model
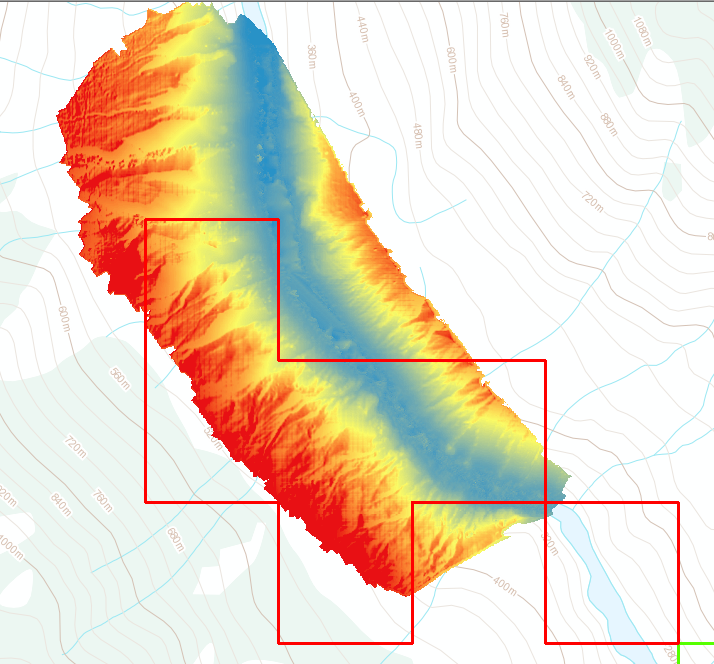
All the data that we produced with this drone is georeferenced. That means that each pixel has a real world coordinate and the model matches up with its real world position. Here’s a couple shots of the orthophoto and the DEM overlayed in ArcGIS.
You might be wondering why go through all this effort? Yeah drones are cool and all but what does this imagery offer to placer miners? The biggest thing we are looking for is ancient river channels or paleo-placer deposits. Using the high definition 3D imagery we can look for signs in the terrain where an ancient channel may have been. In addition to ancient channel mapping we can plan access for people and equipment, analyze land forms for placer potential and know where we can set up machines that need water.
In the future we plan to do some subsurface mapping with a ground penetrating radar system. This will parallel nicely with the UAV data to give us a clear map of the subsurface gravel layers.
These services are provided by West Coast Placer, if you are interested in drone imagery send us a note via the contact page.
Check out our Drone Services page for more details, Drone Services.
West Coast Placer is pleased to announce that we are now offering drone services. We recently acquired an aerial mapping UAV capable of collecting high resolution aerial imagery and topo maps.
Our Drone
Our drone carries a high resolution camera and can cover several square kilometers in one flight. To do more flights we just have to land and change the batteries. The drone is fully autonomous and collects GPS data in sync with the photography. It is a great little package that can deliver amazing results.
Sample Imagery from Drone
We can deliver high resolution orthomosaics in deliverable formats such as GeoTIFF, JPEG, PNG or Google KMZ. Orthomosaics are a composite image of individual photos stitched together to create one large image. They also have coordinates tied to each pixel so that features in the image match up to their real world position. Our drone can produce deliverable 2D or 3D data up to 4cm/pixel. The best and most expensive satellite data that you can currently buy only reaches 15-30cm/px. Here is an image to show the comparison of our data vs Google Earth.
Through processing the flight data we can provide 3D imagery as well which can be used to create topographic data which can be delivered as a DEM, point cloud or other formats depending on the requirements of the job.
Sample Imagery from Drone
Our operator is experienced at operating and developing UAVs with many flight hours to under his belt. We meet all the requirements set out by Transport Canada. We are interested in flying for any needs that a client might have. Of course we have a special interest in placer operations. We are currently working on a technique to utilize the UAV to discover ancient river channels and other features of interest to placer miners.
Please contact us through the contact page for more information and to discuss your project.