In the last couple years the BC government has changed the radio frequencies used on all the forest service roads (FSRs). They used to post the frequencies used so that you could type them in to your handheld radio. With your radio programmed you are able to communicate with other users of the road, ie. logging trucks. The radio system is primarily there as a safety procedure to prevent collisions on BC’s narrow backroads. The cryptic system that they are now using takes away that safety tool if you are not prepared.

I was caught off guard in 2015 when the radio frequency was removed from the West Pavillion FSR which I use to access some of my claims. A sign that mentioned the change was in place but it did not state the new channel.
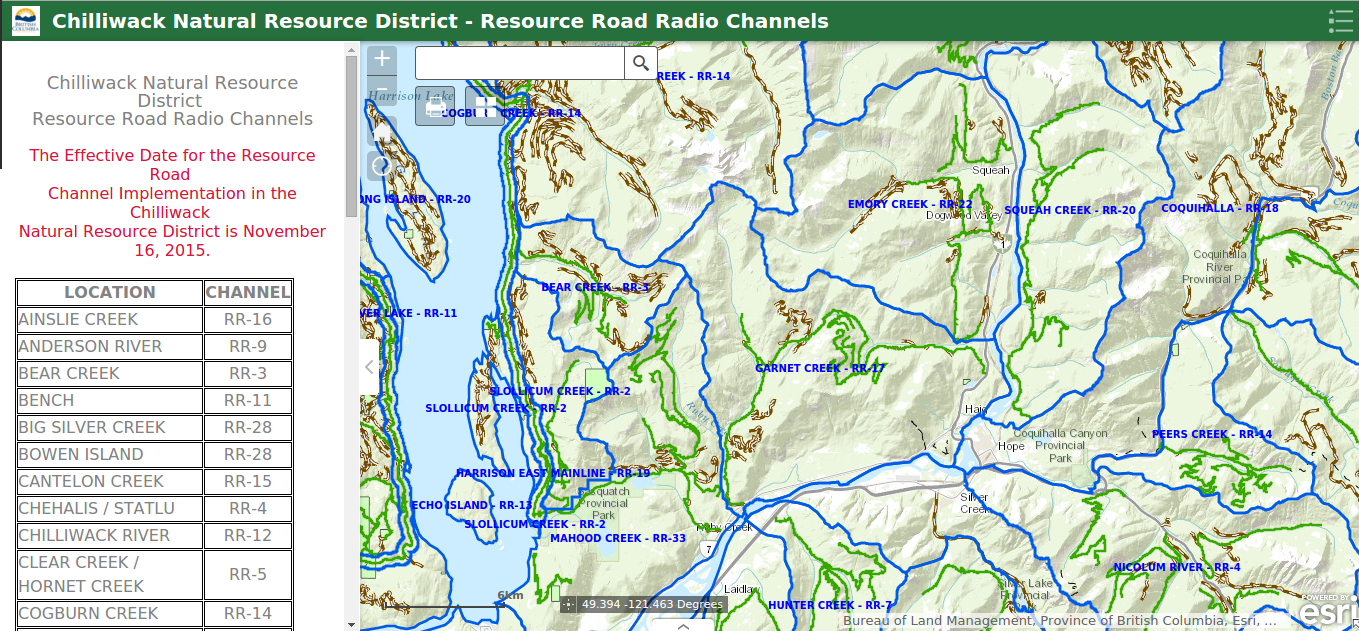
Here is the government site showing which channels are used on which roads: Resource road radio channel maps
This post will help you program your radios for BC’s new RR radio system. You will need a few things for this:
- A Radio
- Programming Cable
- A Computer
- Radio Software
I am using a Baofeng UV-5R programmable radio. I can’t say enough good things about this radio. It is inexpensive (~$30), powerful and has lots of memory channels. The coolest feature is that they are field programmable too. More on the Baofeng UV-5R here, Gear Review: Baofeng Handheld Radio. This guide works for other radios such as a Kenwood or Motorola, although you might need different software.
The cable that I’m using is a FTDI 2-pin Kenwood style. It works for Baofeng and Kenwood radios. For this post I’m using my laptop running Ubuntu linux. But this guide will work with Windows too.
The software is really the key to the whole programming procedure. There is an excellent open source program called CHIRP which stands for CHInese Radio Project. CHIRP was designed to make it easy to program cheap Chinese radios such as the Baofeng, it also works on just about any other radio out there and its free.
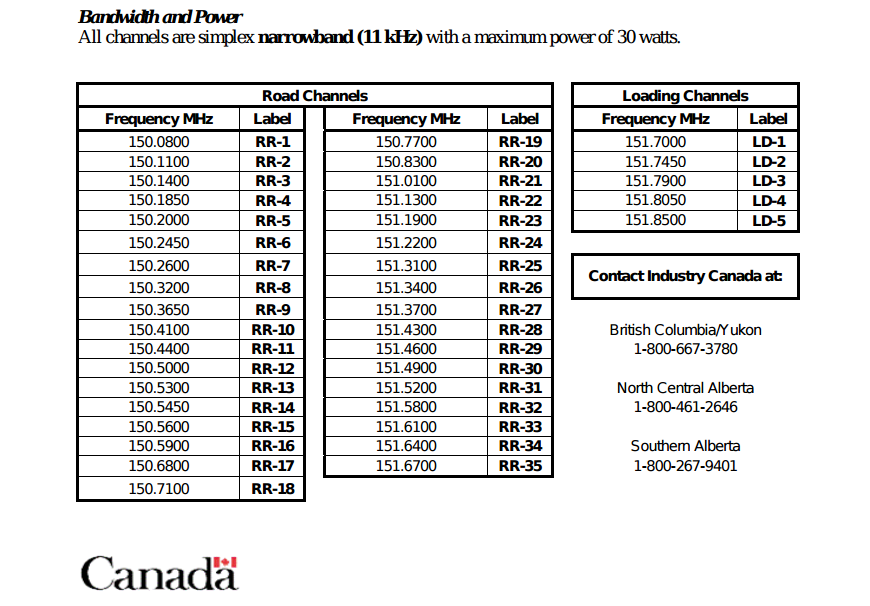
OK lets get started. The first thing that we have to do is get a list of frequencies. I found them on a government website, but I’ll save you the trouble and post them right here.
 You need to download and install CHIRP, on Ubuntu all you have do is run this command:
You need to download and install CHIRP, on Ubuntu all you have do is run this command:
sudo apt-get install chirp
That will download and install the latest version from Ubuntu’s repositories. If you are running Windows or Mac you can download CHIRP from their website here, CHIRP Site. Installation is easy, just run the .exe file and you’re good to go.
Next start up the program, on linux you need to run it as root (AKA administrator) you can do that with the following command:
sudo chirpw
OK, now that CHIRP is started you have a few options. You can clone your radio’s existing channels and modify them. You can start a new file or load in an existing one. Lets start one from scratch. Click on the File menu and select “New”. In my example I added a couple extra channels at the top.
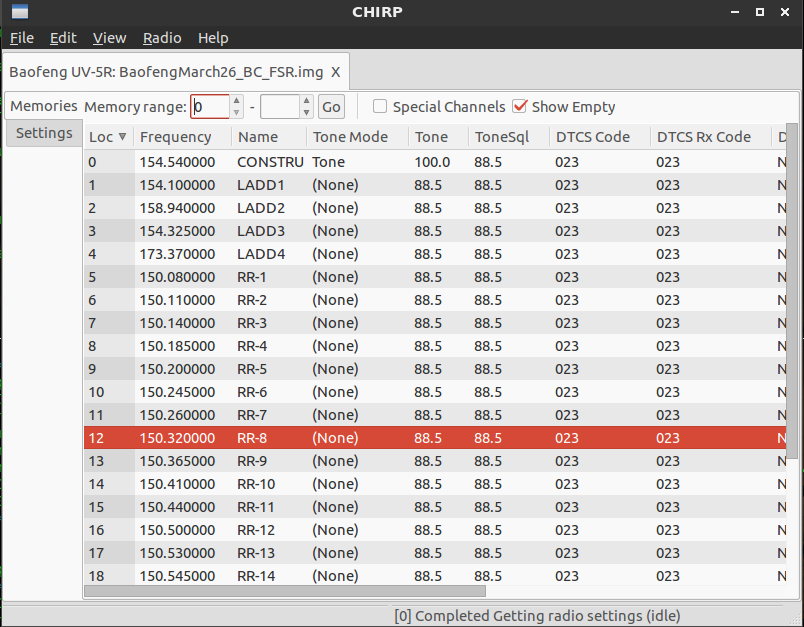
It’s a pretty straightforward application. The window functions a lot like a spreadsheet, there is a row for each channel and different parameters are defined in each column. The BC RR channels are pretty basic so you can ignore most of the columns. The RR channels are simplex, that means that they use the same frequency for transmit and receive. Most public channels are simplex. They have no carrier tone or any other funny business. So we just have to enter the frequencies and the name. Leave the rest of the settings at the default values.
After entering all 35 channels you are ready to load them onto the radio. To do that first connect the programming cable to the radio. It plugs into the port where you can add an external microphone. See photo below:

Make sure the radio is turned off when you connect the cable. Otherwise it could shock the memory and wreck the radio. The software will need to know which serial port you have connected to. In linux you can get that information with the following command:
dmesg | grep tty
Look for the line that looks like this:
[147117.481257] usb 2-3: FTDI USB Serial Device converter now attached to ttyUSB0
That is telling us that the programming cable is on port “ttyUSB0”. In Windows the easiest way is to look at your serial ports in the device manager.
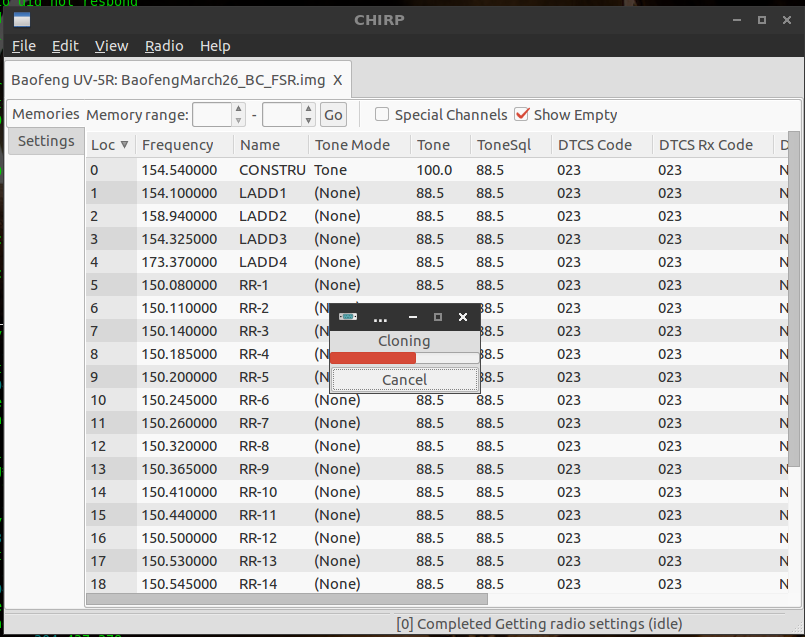
Now you can upload the channels to the radio. Turn on the radio with the programming cable attached. Then choose “Upload to radio” from the Radio menu in CHIRP. You’ll be prompted for the serial port, in my case ttyUSB0. You will also need the radio make and model.
Once you hit OK, the upload will begin. You’ll get a nice progress bar to show you how its going.
That’s about it. Make sure that you turn off the radio before you disconnect the programming cable. Now you’re ready to hit the back roads and communicate with other travellers.
Update on Laws Regarding Programmable Radios 2021
There has been a lot of feedback about this post stating that Baofeng radios are illegal, you need a license, and things of that nature. We were recently contacted by a representative of Innovation, Science and Economic Development Canada (ISED, formerly Industry Canada) and we’ll share the factual information here.
First of all, it’s not illegal to program your own radio in Canada. ISED wants you to have a license for the channels that you are using though.
Most of the regulations in the Radiocommunication Act depend on two principles.
1) Radio spectrum is a limited resource
2) Prevention of “Harmful Interference”
ISED likes to state that the radio spectrum is a limited resource. What does that really mean? Well, there is a limit to the number of frequencies that can be used in a particular area without having overlapping signals. Spectrum management is important in congested areas to maintain quality for all users. This is one of the main goals of ISED. They regulate a lot of radio stuff beyond VHF frequencies on backroads, including cell towers, police and military communication, maritime communication, aviation, and other wireless transmissions. Managing wireless radio is important for our society to function properly. Calling it a “limited resource” is a little weird but management of the frequencies that are being used is important.
According to the ISED representative that contacted us the reason for most of the regulations is to prevent harmful interference. This is the definition that was provided by ISED:
“Radio interference is an adverse effect that could degrade, obstruct or interrupt the use or functioning of a radio. Radio interference can happen for a variety of reasons, and most of the time they are unintentional. In certain situations, the interference can be harmful.
Public safety agencies are critically dependant on their radio systems to provide services to the public. When their radio systems are interfered with, the ability to protect and serve the public is impaired, leaving human lives and property at risk. Non-public safety operations can be negatively impacted by degradation or repeated interruptions to radiocommunication systems. In some cases the interference may not be harmful, but it could still reduce the quality and usability of a radio system. When providing access to spectrum and regulating its use, ISED seeks to maximize the economic and social benefits that Canadians derive from the spectrum, and minimizing interference is a key part of this objective.”
The Radiocommunications Act defines harmful interference as follows:
harmful interference means an adverse effect of electromagnetic energy from any emission, radiation or induction that
- (a) endangers the use or functioning of a safety-related radiocommunication system, or
- (b) significantly degrades or obstructs, or repeatedly interrupts, the use or functioning of radio apparatus or radio-sensitive equipment;
OK, that’s some background on the laws. So what does that have to do with Baofeng radios and using them to communicate for safety reasons on BC’s backroads? The short answer is nothing.
If a radio is programmed correctly it won’t interfere with other radios and won’t cause “harmful interference”. A Baofeng radio is fully capable, and often much more capable, than a Kenwood, Icom or Motorolla that you can purchase from a certified radio shop. We’ll see some of the specific laws below.
Radio equipment in Canada requires licensing. There are two areas where a license is needed. The radio itself needs to be certified, this is usually done at the manufacturer level. Radios that aren’t certified by the manufacturer are required to have a license issued for its use. The criteria for obtaining such a licence is available here: RSS-119 – Land Mobile and Fixed Equipment Operating in the Frequency Range 27.41 – 960 MHz.
Baofeng radios cannot be licensed in Canada because they allow the user to program frequencies with external controls. That goes against Section 3.2 of the Radio Standards Specification
3.2 Transmitters With External Frequency Selection Controls
In order to prevent radio interference caused by end-user transmissions on unauthorized frequencies, transmitters with external frequency selection controls and/or frequency programming capability shall conform to the following:
- (a)Transmitters with external frequency selection controls shall operate only on authorized channels which have been preset by the manufacturer, equipment supplier, service technician or maintenance personnel.
- (b)Transmitters with frequency programming capability must have at least one of the following design characteristics, which prevent the user from altering the preset frequencies:
- Transmitters with external controls available to the user can only be internally modified to place the equipment in the programmable mode. Furthermore, while in the programmable mode, the equipment is not capable of transmitting. The procedure for making the modification and altering the frequency program is not available to the user of the equipment.
- Transmitters are programmed for frequencies through controls that are inaccessible to the user.
- Transmitters are programmed for frequencies through the use of external devices or specifically programmed modules that are available only to the service technician or maintenance personnel.
- Transmitters are programmed through cloning (i.e., copying a program directly from another transmitter) using devices and procedures that are available only to the service technician or maintenance personnel.
Since the Baofeng radios cannot be licensed use of these radios contravenes subsection 4(1) of the Radiocommunication Act which states:
4 (1) No person shall, except under and in accordance with a radio authorization, install, operate or possess radio apparatus, other than
- (a) radio apparatus exempted by or under regulations made under paragraph 6(1)(m); or
- (b) radio apparatus that is capable only of the reception of broadcasting and that is not a distribution undertaking.
According to ISED violation of Section 4(1) can carry a potential fine up to $250. Although that is really just academic since they don’t actually enforce that law.
According to ISED, for a radio using RR and LADD channels, a radio license is required. ISED will only issue a radio license for a radio that is certified and meets the certification requirements. A certified radio should display an IC number on its label (usually this is next to the FCC number). The conditions of use for RR and LADD channels are noted here: RR — British Columbia Resource Road Channels and B1 — Western and Northern Canada Mobile-Only Frequencies.
An ISED radio license costs $42.65/year per radio and is valid from April 1 to March 31 (the following year). This is a flat fee and not dependant on the number of channels.
Operating without a license can theoretically face fines if ISED finds out that you are doing so and has your contact information. You can see the potential fines under the Administrative Monetary Penalties (AMP).
According to the AMP penalties, operating without a license carries a potential fine of $1,000 for the first offense and up to $2,000 for the second offense.
Here’s the kicker though and this is really important, ISED depends on “voluntary compliance”. I asked the representative from ISED for evidence of fines that have been given out in the past and he confirmed that they don’t actually give out fines. They have no means to enforce these laws and do not check what radios people are using. There have been rumors on certain 4×4 groups that ISED sets up roadblocks on FSRs to catch people with illegal radios. Those rumors have been confirmed to be false by the ISED.
It seems odd that the FSR roads are open to the public but the Canadian government is limiting access to radio use by means of a licensing program. It’s also odd that they go out of their way to prevent users from using an inexpensive field-programmable radio. ISED’s explanation of “harmful interference” is ridiculous. In reality, you are protecting yourself and other road users by having communication available.
In summary, there are laws regarding field-programmable radios but they are not enforced. Similar to how there are laws regarding downloading movies or consuming fake maple syrup (actually, that law was repealed in 2019).
To get set up with a compliant radio in BC will typically cost about $1000 for something like a Kenwood NX1200 plus programming costs. Plus $43/year for the rest of your life. In contrast, you can get a BaoFeng UV-82HP for less than $100 CAD which is a better radio and no additional costs. The truck-mounted version is also a very good choice (BTECH Mini UV-25X4).
When driving on backroads in BC it is essential to have a radio. There are loaded logging trucks coming around tight corners and they will not know you’re there unless you have an appropriate radio and are calling out kilometers. A programmable radio such as a Baofeng will not cause interference of any kind and will allow you to communicate safely for a reasonable price. If you’re the kind of person who loses sleep because they downloaded a movie off a BitTorrent site then you should probably get an ISED radio license and a certified radio. For everyone else, there are great options out there and you can use this useful guide to program your own radio.
It should be noted that there are serious radio laws that are actually enforced. Such as transmitting on police or emergency bands. Don’t ever do that, as a joke or otherwise. It is perfectly legal to listen on those channels but very much illegal to transmit.
Also keep in mind that RR and LADD channels are for professional use and your own safety, not for chit-chat or talking to your buddies. There are thousands of channels and if you have a programmable radio you can set a special channel for you and your buddies while keeping the RR channel open for legitimate use.